Разделы
Счетчики
Многопроцессорные распределенные системы управления интеллектуальных мобильных роботов
Необходимость создания интеллектуальных мобильных роботов (ИМР), способных автономно функционировать в условиях, опасных для жизни человека, назрела во многих областях науки и техники, например, при проведении космических и подводных исследований, при работе в зоне радиоактивного или химического загрязнения, при создании безэкипажных боевых машин и так далее. Однако до сих пор интеллектуальные роботы не выходят из стен лабораторий. Это связано с большими трудностями как алгоритмического, так и аппаратного характера, возникающими при создании систем управления подобных роботов.
Постановка задачи
С точки зрения алгоритмического обеспечения, на систему управления интеллектуальным мобильным роботом возлагается сложный комплекс задач, структура которого показана на рисунке 1. В него входят такие задачи, как:
- обработка комплексной сенсорной информации (телевизионной, дальнометрической, тепловизионной и так далее) и формирование на ее основе модели видимой зоны среды движения;
- накопление и корректировка базы знаний робота о среде на основе моделей, формируемых с помощью сенсорных устройств;
- планирование оптимального движения робота к цели на основе накопленной в базе знаний информации о среде и принятие решения о текущем движении робота с учетом его динамических свойств;
- формирование управляющих воздействий на исполнительные устройства робота для отработки выбранного движения;
- обработка навигационной информации и определение координат текущего положения робота в среде, а также текущих значений его курса, крена и дифферента;
- определение целевого положения робота и обеспечение безопасности его движения в ближней зоне препятствий.
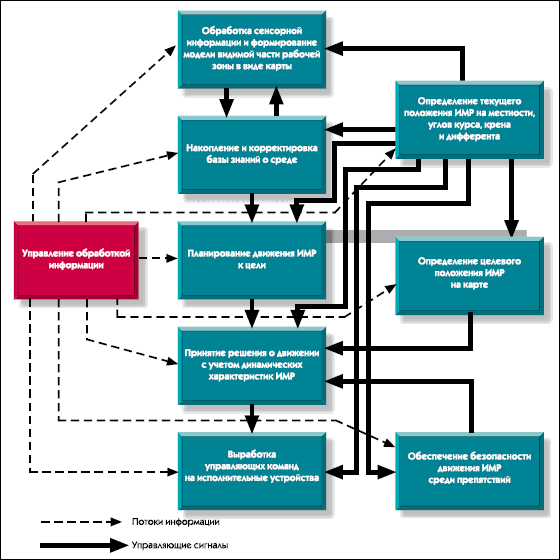
Рисунок 1. Структура комплекса задач системы
управления интеллектуальным мобильным роботом.
С точки зрения аппаратной реализации, система управления интеллектуальным мобильным роботом должна отвечать двум основным требованиям: с одной стороны, она должна обладать быстродействием, достаточным для решения возлагаемого на нее комплекса задач движения интеллектуального мобильного робота в реальном времени, а с другой стороны, должна отвечать типичным требованиям к бортовым системам, то есть быть компактной, надежной и потреблять мало энергии.
Исследования в области разработки и создания систем управления интеллектуальных мобильных роботов ведутся в Научно-исследовательском институте многопроцессорных вычислительных систем и Научно-исследовательском центре супер-ЭВМ и нейрокомпьютеров (г.Таганрог) уже более 15 лет. Исследования проводились в двух основных направлениях. Первое направление посвящено разработке и отладке алгоритмического обеспечения систем управления интеллектуальным мобильным роботом. В частности, в рамках этих работ совместно с научно-производственным предприятием "Квинт" (г.Таганрог) была разработана и создана программная модель системы "ИМР-среда", включающая в себя модель виртуальной среды движения интеллектуального мобильного робота, модель сенсорных систем, в частности, сканирующего дальномера, модель шасси интеллектуального мобильного робота, учитывающая его динамические свойства, и собственно модель системы управления интеллектуальным мобильным роботом.
Путем моделирования движения интеллектуального мобильного робота в виртуальной среде осуществлялась отработка и оптимизация алгоритмов решения как отдельных задач, возлагаемых на систему управления интеллектуальным мобильным роботом, так и алгоритмов функционирования системы в целом. В частности, на рисунке 2 показана типичная тестовая ситуация в виртуальной среде, отображаемая на экране дисплея в трехмерном графическом изображении.

Рисунок 2. Типичная тестовая ситуация,
отображаемая на экране дисплея.
В результате данных исследований были разработаны и апробированы в тестовых ситуациях:
- алгоритмы обработки дальнометрической и телевизионной информации, а также формирования на ее основе интегральной модели среды движения интеллектуального мобильного робота;
- алгоритмы формирования, накопления и корректировки иерархической базы знаний робота о среде;
- алгоритмы планирования оптимального безопасного движения интеллектуального мобильного робота к цели и принятия решения о текущем движении с учетом динамических свойств шасси робота, а также их комплексное взаимодействие в рамках единой системы управления интеллектуальным мобильным роботом.
Второе направление исследований посвящено проблемам разработки аппаратных средств систем управления интеллектуальными мобильными роботами, обеспечивающих возможности реализации разработанных алгоритмов в реальном времени. Как показали проведенные исследования, возможность решения всего комплекса задач, возлагаемых на систему управления интеллектуальным мобильным роботом на базе однопроцессорного вычислительного устройства, очень проблематична.
Проведенное моделирование показало, что для удовлетворения требований реального времени эквивалентная производительность такого устройства должна, по крайней мере, в 50-100 раз превышать производительность процессора Pentium 100, причем эти цифры существенно возрастают при увеличении скорости движения интеллектуального мобильного робота. С другой стороны, жесткие требования к бортовому оборудованию, такие как малые габариты и высокая надежность, ограничивают возможности использования сверхбыстродействующих суперкомпьютеров для создания систем управления интеллектуальным мобильным роботом.
Таким образом, к системе управления интеллектуальным мобильным роботом предъявляются следующие противоречивые требования: с одной стороны, она должна обладать высоким быстродействием, обеспечивающим возможность решения задач обработки информации и принятия решения в реальном времени, с другой стороны, она должна отвечать жестким требованиям, предъявляемым к бортовым устройствам. Решение данной проблемы лежит, по-видимому, на пути построения системы управления интеллектуальным мобильным роботом в виде многопроцессорной распределенной системы, в которой каждый из процессорных узлов решает определенную часть комплекса задач, возлагаемых на систему.
Практическая реализация
В результате многолетних теоретических и практических исследований был разработан и создан целый ряд образцов многопроцессорных распределенных систем управления интеллектуальным мобильным роботом различного назначения. Данные разработки, в частности, проводились совместно с такими организациями, как ВНИИ транспортного машиностроения (г.Санкт-Петербург), в рамках работ по созданию интеллектуального робота-планетохода, предназначенного для исследования поверхности других планет, в частности, Марса, а также Научно-исследовательским институтом специального машиностроения МГТУ имени Н.Э.Баумана в рамках работ по созданию роботов специального назначения.
На рисунке 3 показана обобщенная структурная схема многопроцессорной распределенной системы управления интеллектуальным мобильным роботом. В ее состав входят четыре основные подсистемы, а именно: подсистема восприятия информации, подсистема планирования движения, навигационная подсистема и исполнительная подсистема.
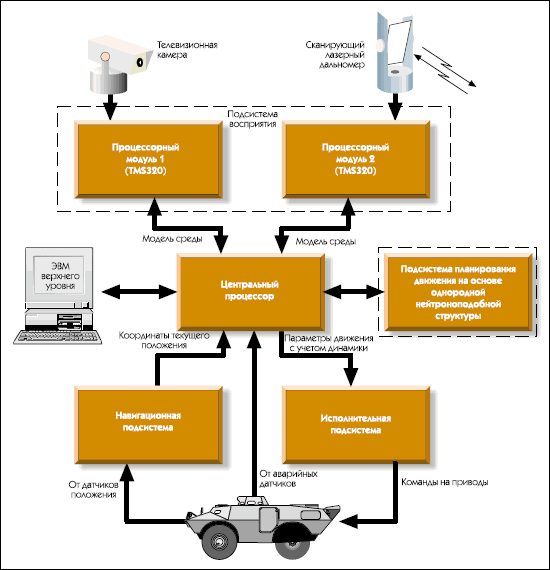
Рисунок 3. Обобщенная структурная схема
многопроцессорной распределенной системы
управления интеллектуальным мобильным роботом.
Каждая из этих подсистем представляет собой самостоятельное вычислительное устройство, координация работы которых осуществляется с помощью центрального процессора.
Рассмотрим более подробно один из реализованных вариантов многопроцессорной системы управления интеллектуальным мобильным роботом. В качестве базовых были использованы вычислительные блоки, выпускаемые фирмой Advantech. Этот выбор объясняется компактностью и высокой надежностью аппаратных узлов, производимых данной фирмой, что позволило обеспечить компактность и надежность системы управления интеллектуальным мобильным роботом в целом.
В качестве центрального процессора в системе используется процессорный модуль на базе процессора 486DX2-66. На него возлагаются функции координации работы отдельных подсистем, а также функции накопления и корректировки базы знаний робота о среде.
Функции обработки сенсорной информации (дальнометрической и телевизионной) возлагаются в системе на два процессорных модуля, каждый из которых включает в себя плату сопряжения с соответствующим источником информации (телевизионной камерой или сканирующим лазерным дальномером) и плату обработки на базе сигнального процессора TMS320.
Особенность системы заключается в том, что задача планирования движения интеллектуального мобильного робота к цели решается в ней с помощью однородной нейроподобной структуры, построенной на базе оригинальных сверхбольших интегральных схем фрагмента однородной нейроподобной структуры (разработчик - Научно-исследовательский институт многопроцессорных вычислительных систем при ТРТУ, г.Таганрог, изготовитель - Научно-исследовательский институт точных технологий, г.Зеленоград). Необходимость использования однородной нейроподобной структуры с параллельным принципом обработки информации вызвана тем обстоятельством, что процессоры последовательного типа не справляются с решением задачи планирования движения в реальном времени. Так, например, время решения данной задачи на процессоре типа 486DX2-66 составляет до 5 секунд, в то время как период ее решения при скорости движения интеллектуального мобильного робота в 15 километров в час должно составлять не более 0,24 секунды.
Плата однородной нейроподобной структуры содержит 4096 элементарных нейропроцессоров, объединенных в одно решающее поле и реализованных с помощью 32 сверхбольших интегральных схем фрагмента однородной нейроподобной структуры. С помощью однородной нейроподобной структуры параллельно анализируются всевозможные варианты движения интеллектуального мобильного робота к цели и выбирается оптимальный, исходя из имеющейся в текущий момент времени в базе знаний информации о среде движения.
Все устройства, входящие в состав системы, связаны с центральным процессором по шине ISA, для чего используется пассивная объединительная плата фирмы Advantech, рассчитанная на 12 посадочных мест. Питание системы осуществляется с помощью блока питания PS-150/DC24, преобразующего бортовое напряжение 24 вольта в напряжения, необходимые для работы отдельных обрабатывающих узлов.
В целом система работает следующим образом. На основе информации, поступающей в текущий момент времени от сенсорного датчика (сканирующего лазерного дальномера или TV-камеры), соответствующий процессорный модуль строит модель проходимости видимой в текущий момент времени области среды, каждому участку которой ставится в соответствие интегральный признак, определяющий трудность его прохождения для робота. После того как данная модель сформирована, процессорный модуль формирует запрос в центральный процессор, по которому последний переходит на подпрограмму считывания построенной модели. С помощью специального алгоритма центральный процессор "накладывает" модель осмотренного участка на созданную ранее иерархическую модель среды движения интеллектуального мобильного робота, привязанную к координатам текущего положения интеллектуального мобильного робота и составляющую его базу знаний о среде.
После этого центральный процессор переходит к основной программе обработки, суть которой заключается в следующем. Модель среды движения, хранящаяся в базе знаний, отображается в однородной нейроподобной структуре, где параллельно разыгрываются всевозможные варианты траекторий движения интеллектуального мобильного робота к цели и выбирается оптимальный, информация о котором передается обратно в центральный процессор. Последний, на основании хранимой динамической модели шасси интеллектуального мобильного робота, рассчитывает параметры текущего движения интеллектуального мобильного робота (радиус поворота и скорость) для движения по оптимальной траектории. Эти параметры передаются далее на исполнительные приводы интеллектуального мобильного робота с помощью специального блока сопряжения с приводами. Выработка управляющих воздействий на приводы осуществляется через каждые 0,2 секунды, что обеспечивает предельную скорость движения интеллектуального мобильного робота в 10-15 километров в час.
Разработанные в рамках проведенных исследований многопроцессорные системы управления интеллектуальными мобильными роботами прошли успешные испытания в условиях, приближенных к реальным, что подтвердило эффективность заложенных в них принципов. В частности, на рисунке 4 показан процесс испытаний прототипа интеллектуального мобильного робота-планетохода, оснащенного подобной системой, на реальном полигоне на Камчатке.

Рисунок 4. Процесс испытаний прототипа интеллектуального
мобильного робота-планетохода на Камчатке.
Заключение
В результате проведенных исследований разработаны алгоритмическое обеспечение, теоретические и практические основы построения многопроцессорных систем управления интеллектуальными мобильными роботами, которые могут быть использованы при создании интеллектуальных мобильных роботов различного назначения, например, научных роботов-исследователей, предназначенных для работы в космосе и под водой; роботов-инспекторов, предназначенных для исследования опасных для человека зон, например, зон радиоактивного или химического загрязнения; роботов-транспортировщиков, предназначенных для транспортировки грузов на производствах; роботов бытового назначения, в частности, роботов-уборщиков производственных и бытовых помещений и тому подобных.
Игорь Каляев, Сергей Капустян, Валентин Клименко, Леонид Усачев, Сергей Стоянов, Олег Луконин
www.cta.ru, апрель 1997 года